電力系統モデルを定義するクラス¶
電力系統モデルについて取り扱っているチュートリアル¶
power_network¶
全ての電力系統モデルの基底クラス.
メンバ変数¶
- x_equilibrium:発電機の内部状態が入った配列
各発電機ごとに内部状態が回転子偏角δ、角周波数偏差Δω、内部電圧E、AVRの変数、PSSの変数の順に格納されている - V_equilibrium:各母線の電圧フェーザの平衡点が複素数値で格納された配列
- I_equilibrium:各母線の電流フェーザの平衡点が複素数値で格納された配列
- a_bus:母線情報のセル配列
i番目の母線の情報はi番目の要素に格納されており、構造体の形で取得出来る
(例 power_network.a_bus{5}.V_equilibriumで5番目の母線の電圧の平衡点が取得出来る) - a_controller_global:グローバルコントローラのセル配列
- a_controller_local:ローカルコントローラのセル配列
- a_branch:送電網のセル配列
メンバ関数¶
-
out = simulate(obj, t, varargin)システムのシミュレーションを行い、その結果を出力する関数- 入力変数
t
シミュレーション時間の設定
[start, end]のようにシミュレーションの開始時刻と終了時刻を秒単位で入力
残りの入力引数は任意
- 入力引数
u:バスへの入力 - 入力引数
idx_u:入力するバスの指定
(上2つを設定する場合には、時刻tの直後に入力する必要がある)
-
入力引数
options: シミュレーションのオプションを設定する(構造体)- linear:線形化を行うか否かの設定
- fault:地絡の条件
{[tstart, tend], idx_fault}というセル配列のセル配列 - x0_sys:内部状態の初期値の設定
バスごとのセル配列あるいは,すべてをスタックしたベクトル - V0:母線電圧の初期値を設定
バスごとのセル配列あるいは,すべてをスタックしたベクトル - I0:母線電流の初期値を設定
バスごとのセル配列あるいは,すべてをスタックしたベクトル - X0_con_local:ローカルコントローラの初期値の設定
コントローラごとのセル配列,あるいは,すべてをスタックしたベクトル - x0_con_global:グローバルコントローラの初期値設定
コントローラごとのセル配列,あるいは,すべてをスタックしたベクトル - rest_time:数値計算(ode)のタイムアウト時間
- do_retry:数値計算(ode)のタイムアウト時の処理
-
出力引数
out
時間応答データが含まれる構造体- t:時刻
- X:母線に繋がれた発電機の状態(母線ごとの配列)
母線に発電機以外がつながれている場合は空 - V:母線の電圧(母線ごとの配列)
- I:母線の電流(母線ごとの配列)
- fault_bus:地絡母線の情報
- U_global:グローバルコントローラが生成した入力(コントローラごとの配列)
- U:ローカルコントローラが生成した入力(コントローラごとの配列)
- sols:ode15sが返す解
- 入力変数
-
add_controller_local(obj, controller)- システムにコントローラを追加する関数
- 入力引数
controller
controllerクラスのインスタンス
ただし、追加するコントローラが指定するバスにすでにコントローラが追加されている場合は、削除してから追加する。
-
add_controller_global(obj, controller)
システムにグローバルコントローラを追加する関数- 入力引数
controller
controllerクラスのインスタンス
ただし、コントローラはグローバルコントローラに限る
- 入力引数
-
remove_controller_local(obj, idx)
システムのコントローラのうち、指定したバスに追加されているものを削除する関数- 入力引数
idx:削除するコントローラの追加されているバス
- 入力引数
-
remove_controller_global(obj, idx)
システムのグローバルコントローラのうち、指定したバスに追加されているものを削除する関数- 入力引数
idx:削除するグローバルコントローラの追加されているバス
- 入力引数
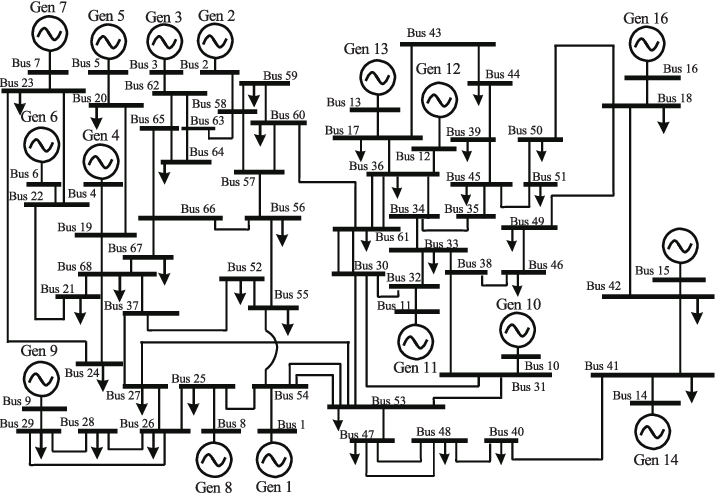
network_IEEE68bus¶
IEEE 68bus 16machine システム(引用元)の実装( power_network クラスの派生クラス)
発電機としてgenerator_1axisを,負荷としてload_impedance を導入したネットワークである.
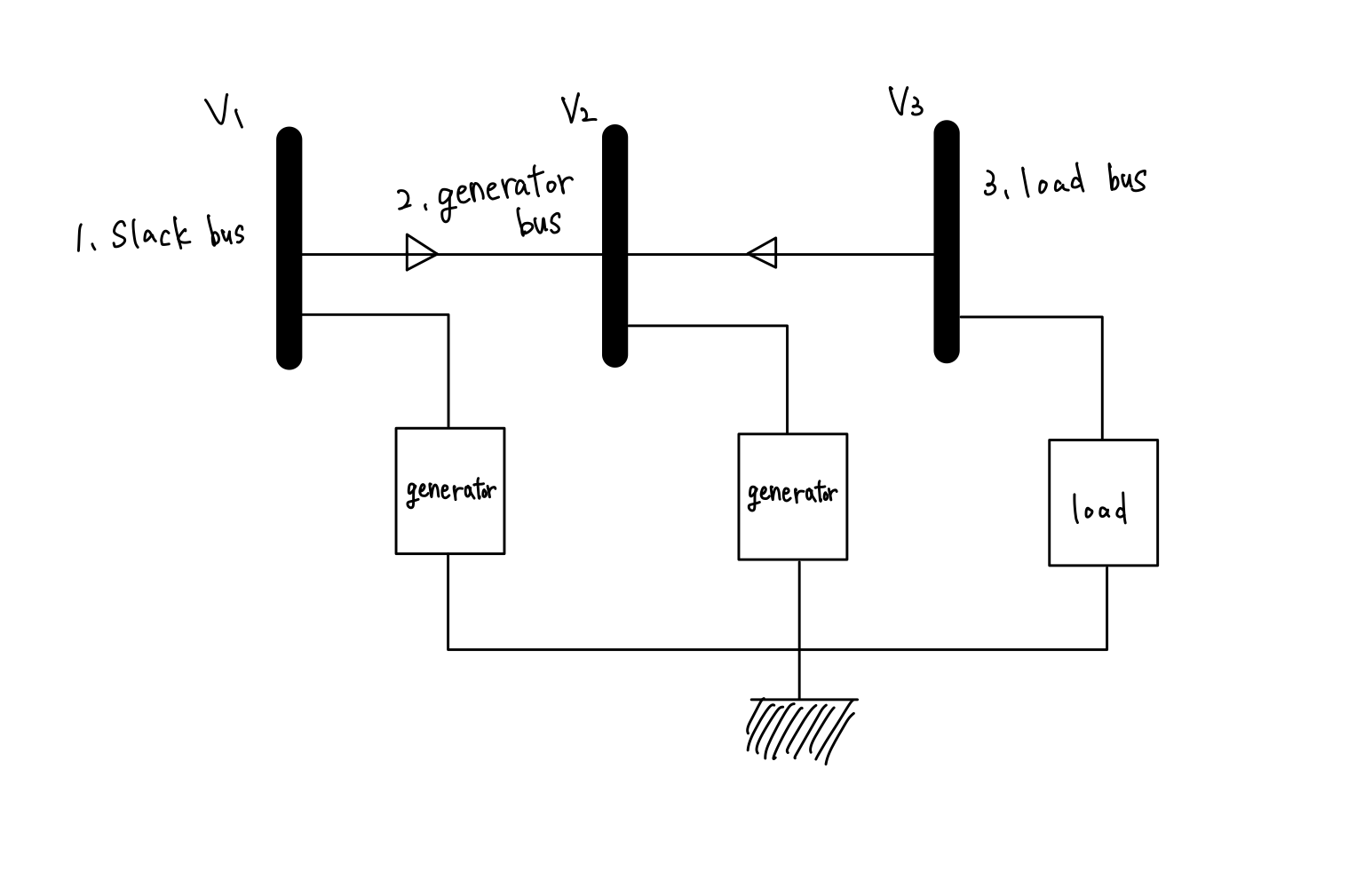
network_sample3bus¶
「一連の解析実行例」にて用いた、バス1(発電機バス)、バス2(発電機バス)、バス3(負荷バス)の3つのバスを下の図のようにつないだシステム。細かなパラメータは「電力系統の定義編」を参照。